
Differences between revisions 4 and 11 (spanning 7 versions)
|
Size: 920
Comment:
|
← Revision 11 as of 2013-08-25 20:38:51 ⇥
Size: 1378
Comment: LinkedImage
|
| Deletions are marked like this. | Additions are marked like this. |
| Line 3: | Line 3: |
| Heng Long Tiger Chassis | |
| Line 5: | Line 4: |
| Cubieboard | <<TableOfContents(2)>> |
| Line 7: | Line 6: |
| arduino kompatibler Wild Thumper Motor Controller | == Hardware == * Heng Long Tiger Chassis * [[http://cubieboard.org/|Cubieboard]] * [[http://www.dagurobot.com/products.php?35|Arduino kompatibler Wild Thumper Motor Controller]] * Webcam * ein paar Kabel * USB-Wlanstick * USB-Bluetoothstick * USB-Hub * FTDI für Console |
| Line 9: | Line 17: |
| Webcam | == Software == |
| Line 11: | Line 19: |
| ein paar Kabel | === Onboard === ==== Cubieboard ==== * Debian * node.js * Johnny Five * camelot * socket.io * firmata |
| Line 13: | Line 28: |
| etwas Software: Server: node.js mit Johnny Five / camelot / socket.io + Abhängigkeiten Client: Webbrowser fertig |
==== Arduino ==== * Standardfirmata |
| Line 17: | Line 31: |
| Todo: | === Client === Als Client reicht ein halbwegs aktueller Webbrowser. Websockets werden per socket.io erzeugt und verwaltet und keypress.js für die WASD-Steuerung === Todo === |
| Line 21: | Line 40: |
| * mehr Performance | * mehr Performance beim Stream |
| Line 24: | Line 43: |
| * feschere Verkabelung (USB-Hub direkt anlöten, abgewinkelte Stecker) * mehr Doku * Code veroeffentlichen |
|
| Line 25: | Line 47: |
| === Bilder === | |
| Line 26: | Line 49: |
| [[attachment:20130713_132300.jpg.jpg|{{attachment:20130713_132300.jpg.jpg||width=267 height=200}}]] [[attachment:20130724_191214.jpg|{{attachment:20130724_191214.jpg||width=267 height=200}}]] [[attachment:20130726_225501.jpg|{{attachment:20130726_225501.jpg||width=267 height=200}}]] [[attachment:20130726_225617.jpg|{{attachment:20130726_225617.jpg||width=267 height=200}}]] |
||<<LinkedImage(20130713_132300.jpg.jpg,description="",width=320)>>||<<LinkedImage(20130724_191214.jpg,description="",width=320)>>|| ||<<LinkedImage(20130726_225501.jpg,description="",width=320)>>||<<LinkedImage(20130726_225617.jpg,description="",width=320)>>|| |
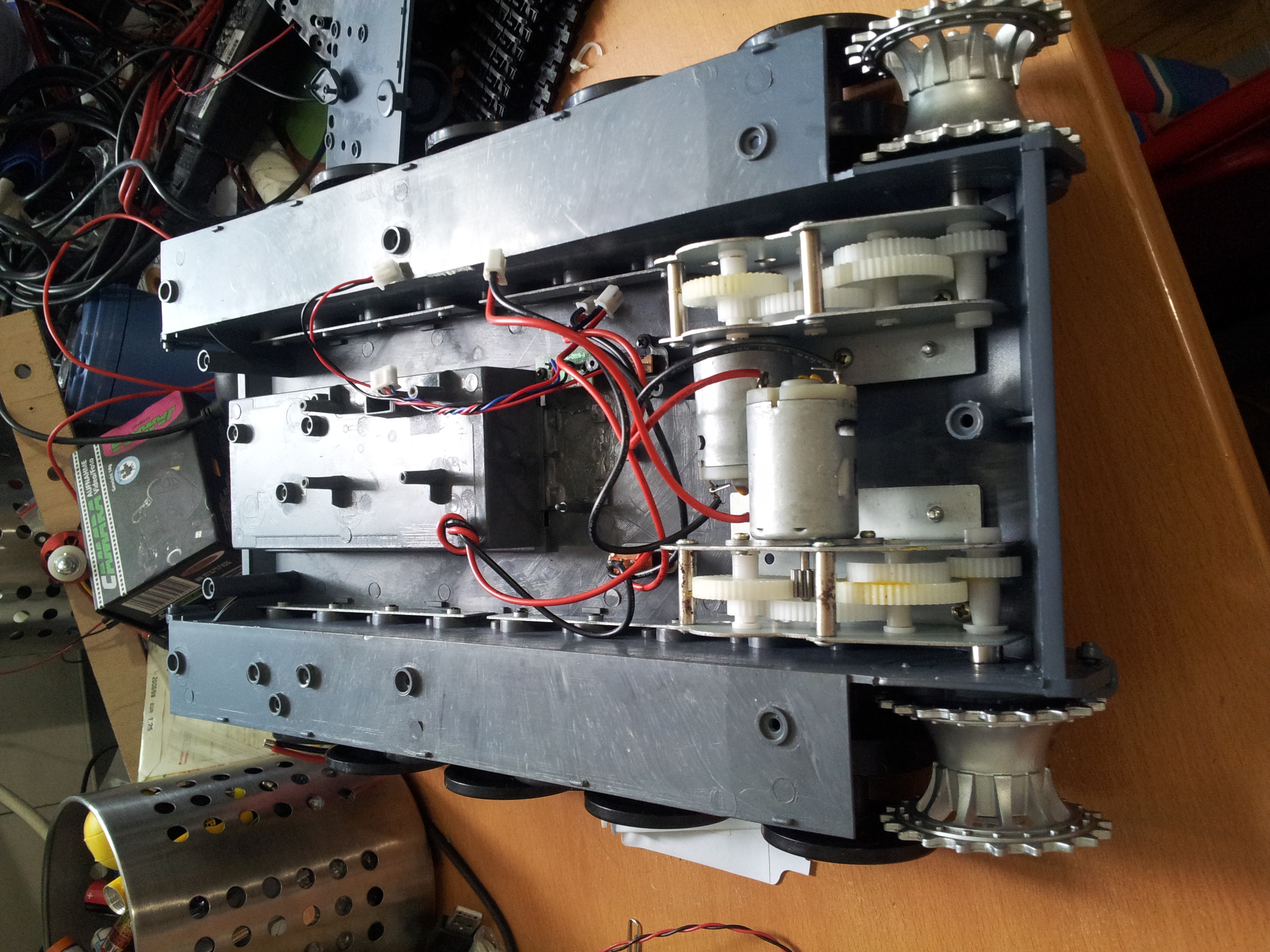
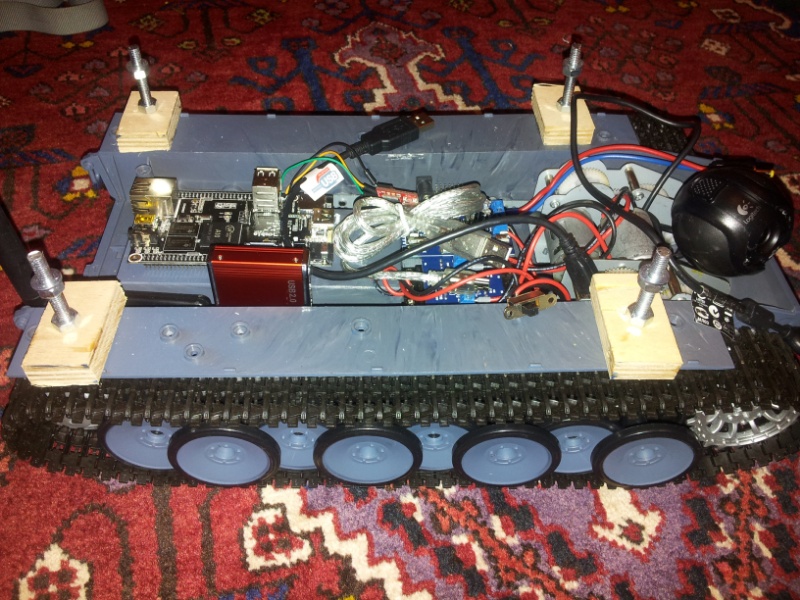
Ein PostWeb2.0 buzzword complete Panzer
Hardware
- Heng Long Tiger Chassis
- Webcam
- ein paar Kabel
- USB-Wlanstick
- USB-Bluetoothstick
- USB-Hub
- FTDI für Console
Software
Onboard
Cubieboard
- Debian
- node.js
- Johnny Five
- camelot
- socket.io
- firmata
Arduino
- Standardfirmata
Client
Als Client reicht ein halbwegs aktueller Webbrowser. Websockets werden per socket.io erzeugt und verwaltet und keypress.js für die WASD-Steuerung
Todo
- HTML5-Touchjoystick
- eigene Arduinofirmware die firmata Kommandos frisst und auf Motorbefehle umsetzt inkl. failsave
- schwenkbare Webcam
- mehr Performance beim Stream
- mehr power!
- Beleuchtung
- feschere Verkabelung (USB-Hub direkt anlöten, abgewinkelte Stecker)
- mehr Doku
- Code veroeffentlichen
Bilder
 |
 |
 |
 |